使用Kalibr和imu_utils标定相机和IMU的内外参
摄像头和IMU内参标定以及其外参标定
标定目的:
飞机上使用的是realsense双目摄像头,以及飞控内置的IMU。不同传感器的数据需要被准确地整合。因此需要确定IMU、摄像头两目分别的内参,两目之间的外参以及IMU和相机之间的外参。
操作思路:
- 飞机上安装好传感器,机载电脑需安装ROS以及IMU, realsense的驱动;工作站上安装好ROS
- 在工作站上安装imu_utils用于标定IMU的内参,安装Kalibr用于标定摄像头内参以及IMU和摄像头的外参
- 在飞机上录制IMU和摄像头的数据,并传输到工作站上
- 在工作站上使用imu_utils标定IMU的内参,使用Kalibr标定摄像头内参以及IMU和摄像头的外参
0. Environment
介绍本标定实验使用的环境。其它软硬件当然也可以,但是需要做相应调整
Drone’s onboard computer
Hardware
- Core board: Jetson (ARM Architecture)
- Carrier Board: Damiao v1.1 nx carrier board
- Camera: Intel Realsense D430 (without IMU)
- IMU: pixhawk mini 6c’s built-in IMU
- FCU-Computer connection: USB c2c (instead of telem2uart)
Software preparation
- Ubuntu 20.04
- ROS Noetic (ROS1)
- librealsense installed (sdk2.0)
- realsense-ros installed ros1-legacy
- mavros installed
- Terminal: bash
Workstation
Software
- Ubuntu 20.04
- ROS Noetic (ROS1)
- Terminal: zsh
1. Install Kalibr and imu_utils (in workstation)
Install Kalibr
按照官方教程 Installation — Building Kalibr from Source来就行
sudo apt-get install -y \
git wget autoconf automake nano \
libeigen3-dev libboost-all-dev libsuitesparse-dev \
doxygen libopencv-dev \
libpoco-dev libtbb-dev libblas-dev liblapack-dev libv4l-dev
# Ubuntu 20.04
sudo apt-get install -y python3-dev python3-pip python3-scipy \
python3-matplotlib ipython3 python3-wxgtk4.0 python3-tk python3-igraph python3-pyx
mkdir -p ~/kalibr_workspace/src
cd ~/kalibr_workspace
export ROS1_DISTRO=noetic # kinetic=16.04, melodic=18.04, noetic=20.04
source /opt/ros/$ROS1_DISTRO/setup.bash
catkin init
catkin config --extend /opt/ros/$ROS1_DISTRO
catkin config --merge-devel # Necessary for catkin_tools >= 0.4.
catkin config --cmake-args -DCMAKE_BUILD_TYPE=Release
cd ~/kalibr_workspace/src
git clone https://github.com/ethz-asl/kalibr.git
cd ~/kalibr_workspace/
catkin build -DCMAKE_BUILD_TYPE=Release -j16Install imu_utils
- 首先安装好依赖的库
- 创建catkin_ws/src
- 将code_utils仓库克隆到catkin_ws/src进行编译
- code_utils编译之后再将code_utils放在src路径下,再编译
安装依赖
sudo apt-get install libdw-devsudo apt-get install libceres-dev编译安装code_utils
code_utils仓库:点击跳转
将源码克隆下来之后,需要修改一堆东西:
- CMakeLists.txt
set(CMAKE_CXX_FLAGS "-std=c++11")修改为 set(CMAKE_CXX_FLAGS "-std=c++14")
- sumpixel_test.cpp
#include "backward.hpp"修改为 #include "code_utils/backward.hpp"
添加头文件: #include <opencv2/imgcodecs.hpp>
然后就可以使用catkin工具编译了
- opencv宏的修改
需要修改的地方还挺多,可以使用搜索工具查找
所有 CV_LOAD_IMAGE_UNCHANGED 改为 cv::IMREAD_UNCHANGED
所有 CV_LOAD_IMAGE_GRAYSCALE 改为 cv::IMREAD_GRAYSCALE
编译安装imu_utils
imu_utils仓库:点击跳转
- CMakeLists.txt
set(CMAKE_CXX_FLAGS "-std=c++11")修改为 set(CMAKE_CXX_FLAGS "-std=c++14")
- imu_an.cpp
添加头文件: #include <fstream>
然后使用catkin工具编译即可
2. Record rosbag (on plane)
Record IMU data
- 启动px4节点
sudo chmod 777 /dev/ttyACM0
roslaunch mavros px4.launch- 调整IMU频率
rosrun mavros mavcmd long 511 105 5000 0 0 0 0 0
rosrun mavros mavcmd long 511 31 5000 0 0 0 0 0第一条命令调整/mavros/imu/data_raw的话题频率为200Hz,第二条调整/mavros/imu/data的话题频率为200Hz
提高频率之后使用如下命令检查IMU频率,应该是200Hz左右
rostopic hz /mavros/imu/data_raw
rostopic hz /mavros/imu/data- 录制数据包
需要静止录制,官方推荐两小时,至少需要一小时
可以把data和data_raw的数据都录下来
rosbag record --duration=120m -o ~/Desktop/imu_calibration/imu_calibration /mavros/imu/data_raw /mavros/imu/dataCalibration targets preparation
摄像头标定以及摄像头-IMU联合标定都需要一个标定板
可以在kalibr/wiki/downloads直接下载Aprilgrid 6x6 0.8x0.8 m (A0 page)的pdf文件和yaml文件。使用A4纸打印出来即可。但是yaml文件里的参数需要修改。
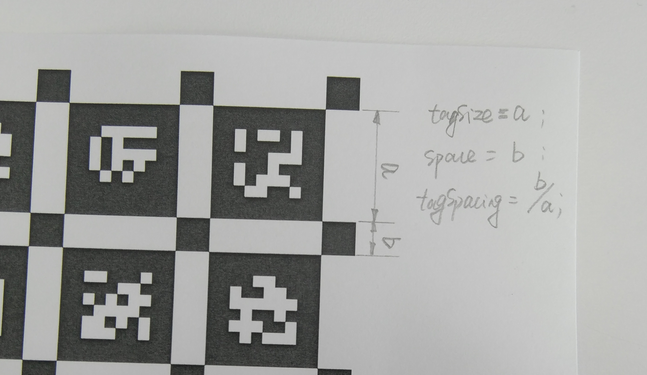
图片来自官方wiki。参数文件中tagSize和tagSpacing两个参数的含义如图所示
标定板yaml文件 aprilgrid_A4.yaml:
target_type: 'aprilgrid' #gridtype
tagCols: 6 #number of apriltags
tagRows: 6 #number of apriltags
tagSize: 0.0205 #size of apriltag, edge to edge [m]
tagSpacing: 0.2927 #ratio of space between tags to tagSize
#example: tagSize=2m, spacing=0.5m --> tagSpacing=0.25[-]以上参数是用A4纸自适应大小打印Aprilgrid 6x6 0.8x0.8 m (A0 page)的参数。具体参数用尺测量即可
Record camera data
- 启动realsense摄像头节点
roslaunch realsense2_camera rs_d430.launch- 另开两个终端,调整两个摄像头的话题频率
rosrun topic_tools throttle messages /camera/infra1/image_rect_raw 4.0 /infra1_image_rect_rawrosrun topic_tools throttle messages /camera/infra2/image_rect_raw 4.0 /infra2_image_rect_raw两个新的话题将以4Hz的频率发布图像数据,话题名称分别为infra1_image_rect_raw和infra2_image_rect_raw
- 再开两个终端,使用rqt_image_view监测摄像头画面
rqt_image_view /infra1_image_rect_rawrqt_image_view /infra2_image_rect_raw- 录制rosbag
录制时的手法演示:Youtube-DIY Indoor Autonomous Drone! - Part 2 (Kalibr & Calibration) 第57秒开始
- 录制150秒
- 保存到
~/Desktop/camera_calibration/路径下,文件名为”camera_calibration+时间戳+.bag” - 记录
infra1_image_rect_raw和infra2_image_rect_raw两个话题
rosbag record \
--duration=150 \
-o ~/Desktop/camera_calibration/camera_calibration \
/infra1_image_rect_raw \
/infra2_image_rect_raw整理为自动化脚本
#!/bin/bash
# 启动第一个终端 启动realsense节点
gnome-terminal -- bash -c "echo 'The first terminal to launch realsense node'; roslaunch realsense2_camera rs_d430.launch; exec bash"
# 等待10秒钟 等摄像头节点完全启动
sleep 10
# 启动第二个终端 调整第一个摄像头的话题频率
gnome-terminal -- bash -c "echo 'The second terminal to modify the frame rate'; rosrun topic_tools throttle messages /camera/infra1/image_rect_raw 4.0 /infra1_image_rect_raw; exec bash"
# 启动第三个终端 调整第二个摄像头的话题频率
gnome-terminal -- bash -c "echo 'The third terminal to modify the frame rate'; rosrun topic_tools throttle messages /camera/infra2/image_rect_raw 4.0 /infra2_image_rect_raw; exec bash"
# 启动两个终端,使用rqt_image监测两个摄像头的内容
gnome-terminal -- bash -c "echo 'The fourth terminal to monitor the first camera'; rqt_image_view /infra1_image_rect_raw; exec bash"
gnome-terminal -- bash -c "echo 'The fifth terminal to monitor the second camera'; rqt_image_view /infra2_image_rect_raw; exec bash"
# 留15秒钟时间做录制准备
# 调整rqt窗口位置,调整摄像头位置
sleep 15
# 启动录制脚本
gnome-terminal -- bash -c "echo 'Start recording'; rosbag record --duration=150 -o ~/Desktop/camera_calibration/camera_calibration /infra1_image_rect_raw /infra2_image_rect_raw; exec bash"Record camera-IMU data
和摄像头数据录制类似,增加启动IMU节点和的步骤以及录包时录上IMU的数据
自动化脚本如下
#!/bin/bash
# Starting the imu
gnome-terminal -- bash -c "echo 'Terminal for starting imu';
PASSWORD='1';
echo $PASSWORD | sudo -S chmod 777 /dev/ttyACM0;
roslaunch mavros px4.launch;
exec bash"
sleep 10
gnome-terminal -- bash -c "echo 'Terminal for changing the rate of imu topic';
rosrun mavros mavcmd long 511 105 5000 0 0 0 0 0;
rosrun mavros mavcmd long 511 31 5000 0 0 0 0 0;
exec bash"
sleep 2
# Starting the cameras
gnome-terminal -- bash -c "echo 'The first terminal to launch realsense node'; roslaunch realsense2_camera rs_d430.launch; exec bash"
sleep 10
gnome-terminal -- bash -c "echo 'The fourth terminal to monitor the first camera'; rqt_image_view /camera/infra1/image_rect_raw; exec bash"
sleep 2
gnome-terminal -- bash -c "echo 'The fifth terminal to monitor the second camera'; rqt_image_view /camera/infra2/image_rect_raw; exec bash"
# Ensure directory exists
mkdir -p ~/Desktop/camera_imu_calibration
# 等待15秒钟 准备开启录制窗口
sleep 15
gnome-terminal -- bash -c "echo 'Start recording'; rosbag record --duration=120 -o ~/Desktop/camera_imu_calibration/camera_imu_calibration /camera/infra1/image_rect_raw /camera/infra2/image_rect_raw /mavros/imu/data /mavros/imu/data_raw; exec bash"
3. Calibration (on workstation)
IMU calibration
- 编写launch文件
参考官方REAEDME to run 部分
px4_calibration.launch文件内容如下:
<launch>
<node pkg="imu_utils" type="imu_an" name="imu_an" output="screen">
<param name="imu_topic" type="string" value= "/djiros/imu"/>
<param name="imu_name" type="string" value= "A3"/>
<param name="data_save_path" type="string" value= "$(find imu_utils)/data/"/>
<param name="max_time_min" type="int" value= "120"/>
<param name="max_cluster" type="int" value= "100"/>
</node>
</launch>- imu_topic的参数值,修改为录制时话题的名称
- max_time的参数值,需要小于录包时长
- 启动刚编写好的launch文件
source devel/setup.zsh
roslaunch imu_utils px4_calibration.launch- 播放录制的IMU数据包
rosbag play -r 200 imu.bagCamera calibration (Using Kalibr)
官方文档: Kalibr - Multiple camera calibration - wiki page
文件准备
- 刚才录制的摄像头数据包
- 标定板yaml参数文件
运行标定
启动roscore, 并运行如下脚本
source ~/kalibr_workspace/devel/setup.zsh
rosrun kalibr kalibr_calibrate_cameras \
--bag camera_calibration_2024-09-29-00-43-00.bag \
--topics /infra1_image_rect_raw /infra2_image_rect_raw \
--models pinhole-radtan pinhole-radtan \
--target aprilgrid_A4.yaml- bag后面跟包名,注意相对路径
- topics后面跟话题名,注意和录制的话题名一致
- models后面跟相机模型,realsense d430用的是pinhole-radtan。两个摄像头就需要写两次
Camera-IMU calibration (Using Kalibr)
文件准备
- 刚才录制的摄像头+IMU数据包
- 标定板yaml文件(和摄像头内参标定是用的一样)
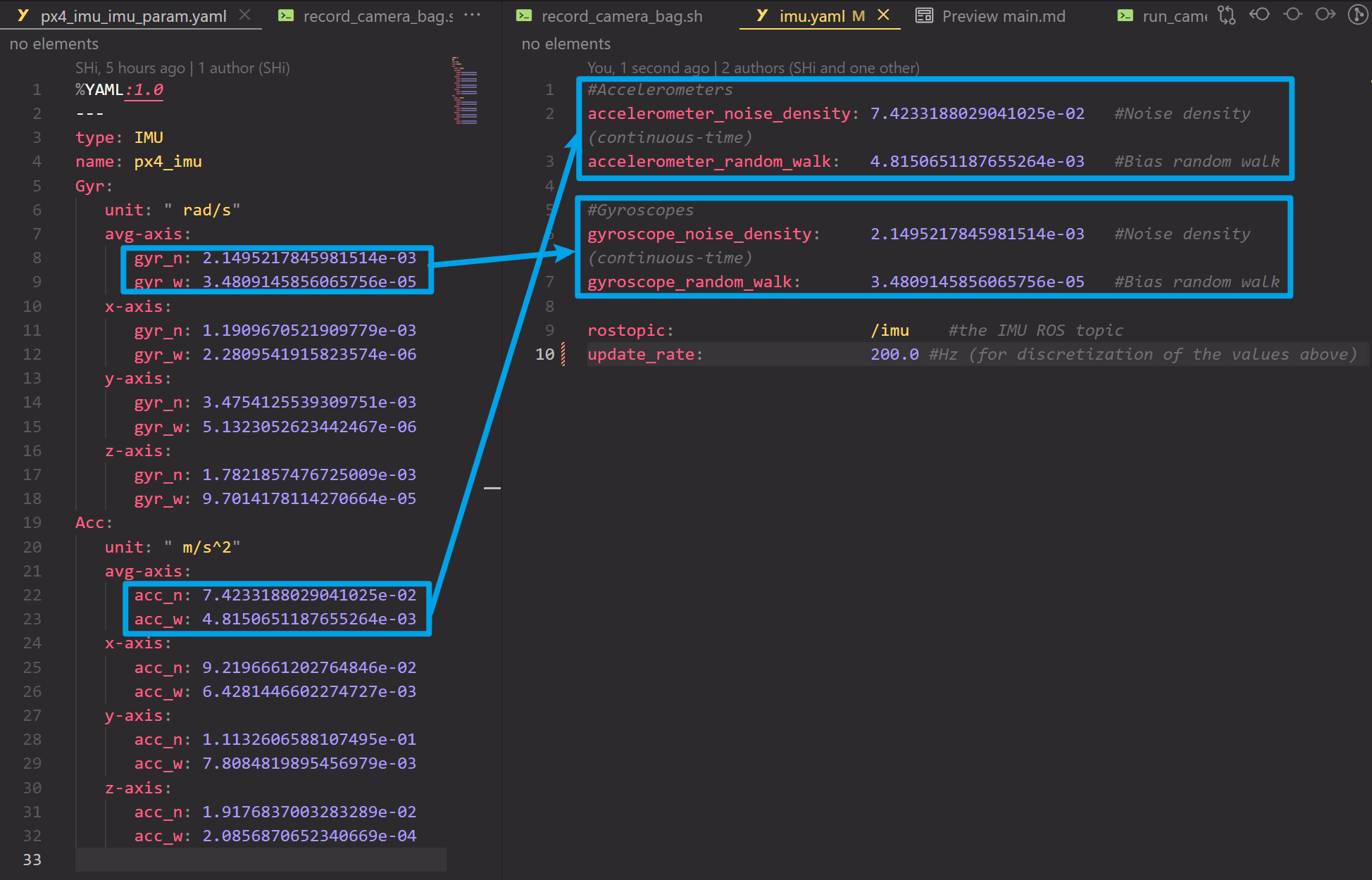
- IMU yaml文件 (需从IMU标定生成的yaml文件中提取)
- camera yaml文件 (摄像头标定后生成的)
参数文件标准格式示例网站:Kalibr - Yaml formats - wiki page
IMU yaml文件迁移示例(从imu_utils标定的参数结果文件迁移):
运行标定
启动roscore, 并运行如下脚本
source ~/kalibr_workspace/devel/setup.zsh
rosrun kalibr kalibr_calibrate_imu_camera \
--target aprilgrid_A4.yaml \
--cam camera_calibration_2024-09-29-00-43-00-camchain.yaml \
--imu imu.yaml \
--bag camera_imu_calibration_2024-09-29-01-32-19.bag \
--bag-from-to 10 110- target 后面加标定板参数文件
- cam 后面加摄像头参数文件。注意参数文件中的话题名称要调整为camera_imu联合录制的包里面对应的话题名称
- imu 后面加IMU参数文件
- bag 后面加数据包文件
- bag-from-to 后面加数据包开始和结束时间(单位:秒)(这里选择10~110秒弃用开始和结尾的一小段数据)
References & Navigation
[0] 首先感谢浩哥和师兄泽总的帮助🤩🤩🤩
[2] imu_utils github repository
使用Kalibr和imu_utils标定相机和IMU的内外参
https://shihantian.github.io/2024/09/30/Calibrate-cameras-and-IMU-with-Kalibr-and-imu_utils/